
Aktive Filtersysteme sind ein weit verbreitetes Mittel, um verschiedenen Phänomenen unzureichender Netzqualität entgegenzuwirken. Dazu gehören vor allem Effekte, die durch den spezifischen Strombedarf von Lasten (dem Laststrom z.B. von Antriebssystemen) hervorgerufen werden und damit die Kurvenform des Laststroms (Oberschwingungen), den Phasenverschiebung zwischen Spannung und Strom (Leistungsfaktor) sowie die Gleichmäßigkeit der Leiterbelastung (Unsymmetrie) bestimmen. Darüber hinaus rücken zunehmend auch Effekte der Form und des zeitlichen Verlaufs der Spannung, wie z.B. kurze Spannungseinbrüche und Spannungsänderungen (Thema Flicker), verstärkt in den Fokus aktiver Filtersysteme.
Im Gegensatz zu passiven Filtern, die mit Induktivitäten, Kondensatoren und Widerständen arbeiten, nutzen aktive Filter Leistungselektronik und Regelungssysteme, um dynamisch auf sich ändernde Situationen im Versorgungsnetz zu reagieren. Aktive Filter, wie sie üblicherweise am Markt angeboten werden, sind eigentlich Komponenten zur Generierung induktiver oder kapazitiver Blindleistung (aktive Blindleistungsfilter), in Sonderfällen auch Wirkleistung (aktive Wirkleistungsfilter). Aktive Blind- und Wirkleistungsfilter werden in unterschiedlichen Konfigurationen und Ausführungen unter verschiedenen Bezeichnungen wie z.B. APF (Active Power Filter), Shunt-APF, Grid-Conditioner, Kompensations-System oder AHF (Active Harmonic Filter) angeboten.
Der prinzipielle Aufbau, das Funktionsprinzip, die Möglichkeiten und Grenzen sind bis auf wenige Sonderausführungen bei allen Herstellern nahezu identisch. Unter Sonderausführungen versteht man u.a. spezielle Varianten wie z.B. Wirkleistungsfilter mit integrierten Wirkenergiespeichern (z.B. Batteriepacks), die hier nicht weiter betrachtet werden. Der Fokus liegt auf aktiven Blindleistungsfiltern.
Funktionaler Aufbau
Die folgende Abbildung zeigt den prinzipiellen Aufbau:
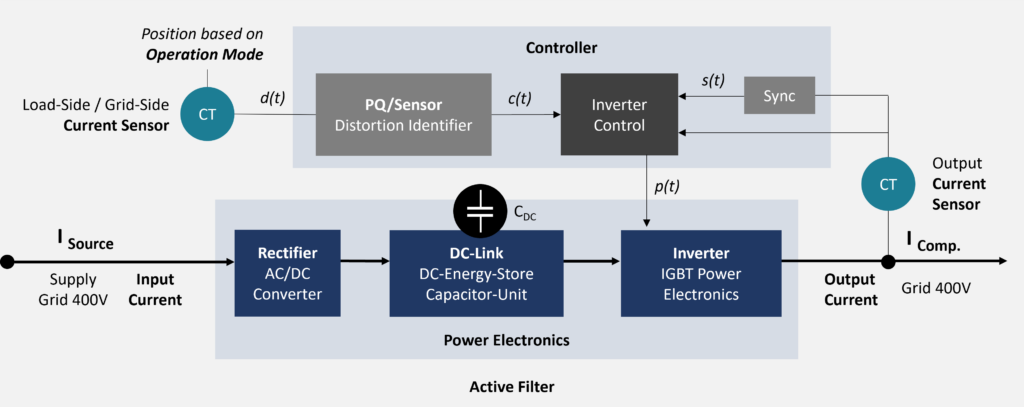
Abbildung 1 – Schematic diagram of an active filter
Wie bereits erwähnt, sind aktive Blindleistungsfilter geregelte Stromquellen, die auf Basis einer Führungsgröße über Regelalgorithmen und Leistungselektronik einen weitgehend frei definierbaren Blindstrom (kapazitiv/induktiv) erzeugen können. Die hierfür benötigte Führungsgröße (der Laststrom) wird in der Regel über einen externen Messwandler (CT/Current-Transformer) erfasst – Systeme, die keinen dedizierten externen Wandler verwenden, sondern direkt am Anschlusspunkt der Leistungselektronik messen, sind unter der Bezeichnung „Sensorless“ am Markt zu finden.
Das verzerrte Stromsignal des Laststroms d(t) wird über einen Sensor-Funktionsbaustein (Distortion-Identifier) analysiert und in seine Komponenten zerlegt (z.B. FFT). Daraus wird ein entsprechendes Kompensationsstromsignal c(t) generiert, das schließlich zur Kompensation der Störanteile des erfassten Laststroms dient. Im einfachsten Fall entspricht dieses Signal (analog zur Funktionsweise von Noise-Cancelling-Kopfhörern) dem invertierten (um 180° phasenverschobenen) Störsignal.
Ein Synchronisationsblock (Sync-Block) sorgt für die Synchronisation der einzuspeisenden Kompensationsströme mit dem Versorgungsnetz und erzeugt ein entsprechendes Synchronisationssignal s(t). Kompensations- und Synchronisations-Signal werden im Inverter-Controller zusammengeführt, der daraus ein Pulsmuster/Takt p(t) für den Leistungsteil des aktiven Filters erzeugt.
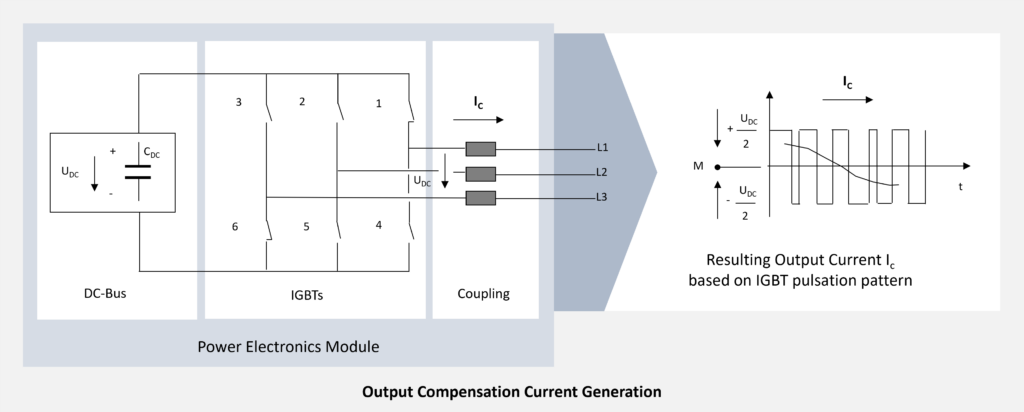
Abbildung 2: IGBT Leistungsteil (Pulsstromrichter) / Ersatzschaltbild
Die Ausgangsseite (Leistungsteil) des aktiven Filters besteht bei Filtern, die im Niederspannungsbereich (< 1 kV) eingesetzt werden, aus einer Koppelspule (Drossel zur Dämpfung unerwünschter Rückwirkungen), einem IGBT-Leistungsteil (Insulated Gate Bipolar Transistor) und der Kondensatoreinheit des Gleichspannungszwischenkreises CDC. Bei Anwendungen im Bereich > 1 kV (Mittelspannung) wird die Koppelspule durch den Koppeltransformator ersetzt.
Die IGBTs können hier als gesteuerte Schalter betrachtet werden (Bild 2). Sind die IGBT-Schalter 1 und 6 geschlossen, so liegt die Spannung am Zwischenkreiskondensator UDC zwischen L1 und L3. Durch entsprechendes Takten der IGBTs auf Basis des erzeugten Pulsmusters (durch den Inverter-Controller) kann eine beliebige Referenzspannung eingestellt werden. Durch Variation des Pulsmusters über die Zeit lassen sich, begrenzt durch die Taktfrequenz (z.B. 20kHz) des Controllers sowie das gewählte Regelverfahren und die eingesetzten Hardwarekomponenten, nahezu beliebige Stromsignale erzeugen.
Die hierfür benötigte Energie wird über einen Gleichstromzwischenkreis (DC-Bus) bereitgestellt. Als Speicher dient hier in der Regel eine Kondensatoreinheit, die über einen Gleichrichter kontinuierlich aus dem Versorgungsnetz aufgeladen wird. Neben der Speicherfunktion glättet diese Kondensatoreinheit auch die durch den Eingangskreis des Filters gleichgerichtete Spannung und sorgt für eine konstante Zwischenkreisspannung (typischerweise ca. 800 V
Da in der Regel keine zusätzliche Gleichstromquelle (z.B. Batteriepaket einer PV-Anlage) in den DC-Bus eingespeist wird, ergibt sich auch die bereits eingangs erwähnte Einschränkung für die Stromsignalerzeugung IComp als geregelte Blindstromquelle – denn die hier eingesetzten Kondensatoreinheiten können logischerweise nur Blindleistung und keine Wirkleistung zur Verfügung stellen. Der Stromfluss IComp entsteht, wenn zwischen der Spannung am Netzanschlusspunkt und der erzeugten DC-Quellenspannung UDC eine Differenz besteht, die zu einem Spannungsabfall an der Koppelinduktivität führt. Der Kompensationsstrom kann dann in das Netz fließen, um die Störströme zu kompensieren.
Die Leistungselektronik wird in der Regel in kompakter Modulbauweise ausgeführt und zusammen mit der Steuerungshardware, den elektronischen Elementen zur Netzankopplung sowie der internen Stromversorgung in Standardindustrie-Schränken (z.B. Rittal) integriert. Die Ausführung als Schrank mit modularen Leistungseinschüben ermöglicht die Skalierung der aktiven Filteranlage entsprechend den Leistungsanforderungen der Anwendung durch gezielte Erweiterung der Module. Neben der Schrankausführung werden für spezielle Anwendungen auch kleine Wandmodule angeboten, die die Einzelkomponenten in einem schlanken Gehäuse integrieren – diese Systeme sind in der Regel nicht in der Leistung skalierbar.
Die Leistung wird üblicherweise als maximal lieferbarer Blindstrom angegeben (z.B. 60A pro Leistungseinschub). Abhängig von der vorherrschenden Netzspannung kann dann die Anlagenleistung (Blindleistungsbereitstellung) berechnet werden z.B. 400V x √3 x 60A x 5 Module => ca. 200 kVar
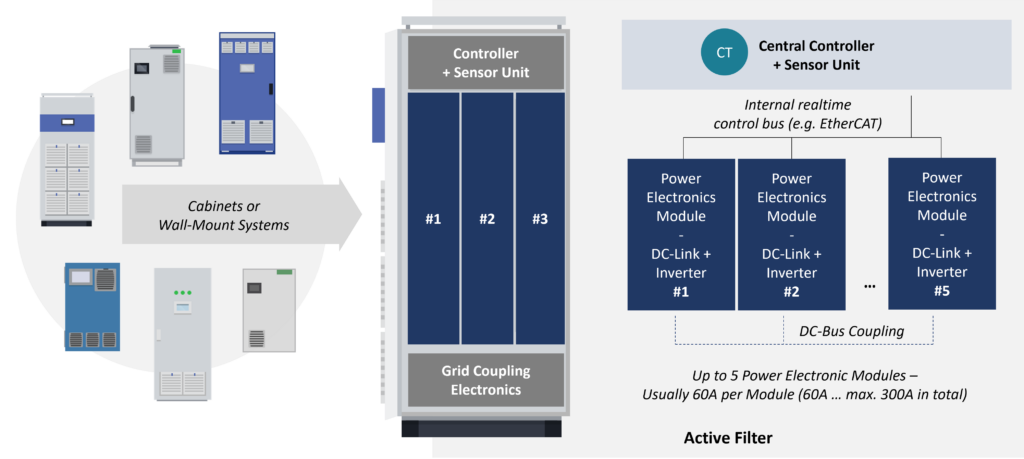
Abbildung 3: Assembly and Layout
Fazit und Zusammenfassung
Aktive Filter sind geregelte Blindstromquellen, die einen wichtigen Beitrag zur Entstörung und Stabilisierung von industriellen Verteilnetzen leisten. Abhängig von den erfassten Störpegeln und unterschiedlichen Regelalgorithmen erzeugen aktive Filter Blindströme, die über eine Leistungselektronik zur Kompensation der Störphänomene in das Netz eingespeist werden. Die adressierbaren Störphänomene hängen einerseits von der Hardware und den Regelalgorithmen ab, andererseits aber auch von der gewählten Anschlusskonfiguration. Mehr zum Thema Anschlusskonfiguration erfahren Sie in unserem Beitrag „Anschlusskonfigurationen aktiver Filter“.
Da es sich bei aktiven Filtern um aktive Netzteilnehmer handelt, ist deren kontinuierliche Überwachung und Überprüfung der Funktionseffizienz von entscheidender Bedeutung. Ausfälle und Störungen oder vorzeitiger Verschleiß können das Ausfallrisiko erhöhen und Ihren Prozess gefährden.
Im schlimmsten Fall können falsch parametrierte Aktivfilter als Störer wirken und Ihre Netzstabilität gefährden (z.B. durch Bildung von Resonanzstellen). Unsere Experten beraten Sie gerne bei der Auswahl, Parametrierung und Überwachung Ihrer aktiven Filtersysteme.